# 光线步进
- 3D Signed Distance Function
- Ray Marching
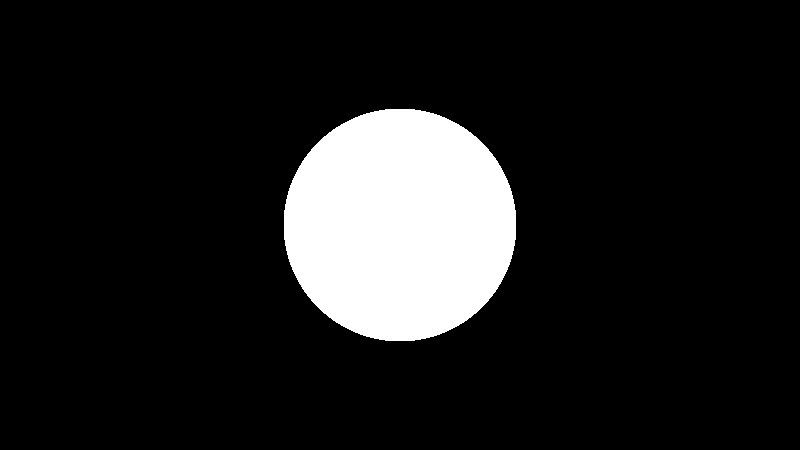
# 朴素的球
#define TMIN 0.1
#define TMAX 20.0
#define RAYMARCH_TIME 128
#define PRECISION .001
vec2 fixUV(in vec2 c) {
return (2. * c - iResolution.xy) / min(iResolution.x, iResolution.y);
}
float sdfSphere(in vec3 p){
return length(p) - .5;
}
float rayMarch(in vec3 ro, in vec3 rd){
float t = TMIN;
for(int i = 0; i < RAYMARCH_TIME && t < TMAX; i++){
vec3 p = ro + t * rd; //步进
float d = sdfSphere(p);
if(d < PRECISION){
break;
}
t += d;
}
return t;
}
vec3 render( in vec2 uv){
vec3 color = vec3(0.);
vec3 ro = vec3(0., 0., -2.); // 相机位置
vec3 rd = normalize(vec3(uv, 0.) - ro); // 对每个像素的方向向量
float t = rayMarch(ro,rd); // 对每个像素进行步进
if(t < TMAX){
color = vec3(1.);
}
return color;
}
void mainImage (out vec4 fragColor, in vec2 fragCoord){
vec2 uv = fixUV(fragCoord);
vec3 color = render(uv);
fragColor = vec4(color, 1.); // rgba
}
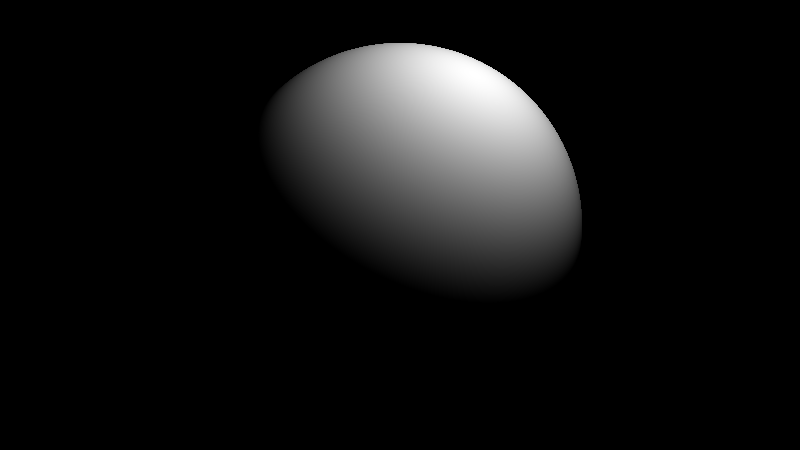
# 点光源
#define TMIN 0.1
#define TMAX 20.0
#define RAYMARCH_TIME 128
#define PRECISION .001
vec2 fixUV(in vec2 c) {
return (2. * c - iResolution.xy) / min(iResolution.x, iResolution.y);
}
// 球体的符号距离函数
float sdfSphere(in vec3 p) {
return length(p - vec3(0., 0., 2.)) - 1.5;
}
// 光线步进
float rayMarch(in vec3 ro, in vec3 rd) {
float t = TMIN;
for (int i = 0; i < RAYMARCH_TIME && t < TMAX; i++) {
vec3 p = ro + t * rd; // 步进
float d = sdfSphere(p);
if (d < PRECISION) {
break;
}
t += d;
}
return t;
}
vec3 calcNormal(in vec3 p) {
const float h = 0.0001;
const vec2 k = vec2(1, -1);
return normalize(
k.xyy * sdfSphere(p + k.xyy * h) + k.yyx * sdfSphere(p + k.yyx * h) +
k.yxy * sdfSphere(p + k.yxy * h) + k.xxx * sdfSphere(p + k.xxx * h)
);
}
vec3 render(in vec2 uv) {
vec3 color = vec3(0.);
vec3 ro = vec3(0., 0., -2.); // 相机位置
vec3 rd = normalize(vec3(uv, 0.) - ro);
float t = rayMarch(ro, rd);
if (t < TMAX) {
// color = vec3(1.);
vec3 p = ro + t * rd; // 当前位置
vec3 n = calcNormal(p); // 法向量
vec3 light = vec3(1., 2., 0.); // 光源
float dif = clamp(dot(normalize(light - p),n),0., 1.);
color = dif * vec3(1.);
}
return color;
}
void mainImage(out vec4 fragColor, in vec2 fragCoord) {
vec2 uv = fixUV(fragCoord);
vec3 color = render(uv);
fragColor = vec4(color, 1.); // rgba
}
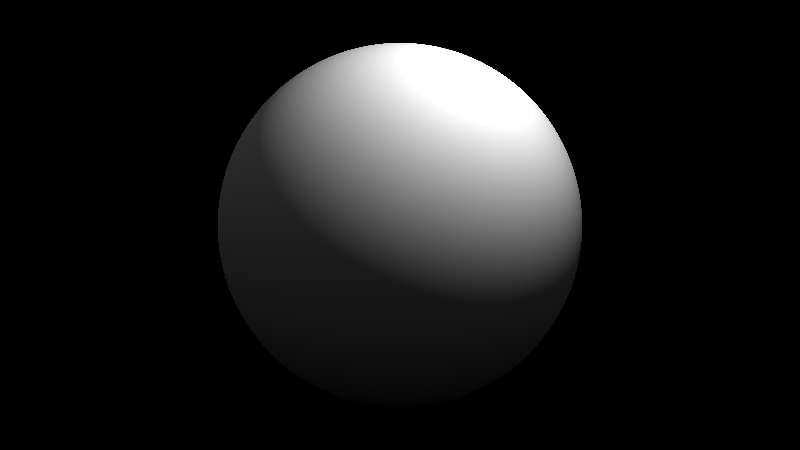
# 环境光
#define TMIN 0.1
#define TMAX 20.0
#define RAYMARCH_TIME 128
#define PRECISION .001
vec2 fixUV(in vec2 c) {
return (2. * c - iResolution.xy) / min(iResolution.x, iResolution.y);
}
// 球体的符号距离函数
float sdfSphere(in vec3 p) { return length(p - vec3(0., 0., 2.)) - 1.5; }
// 光线步进
float rayMarch(in vec3 ro, in vec3 rd) {
float t = TMIN;
for (int i = 0; i < RAYMARCH_TIME && t < TMAX; i++) {
vec3 p = ro + t * rd; // 步进
float d = sdfSphere(p);
if (d < PRECISION) {
break;
}
t += d;
}
return t;
}
// 计算法向量
vec3 calcNormal(in vec3 p) {
const float h = 0.0001;
const vec2 k = vec2(1, -1);
return normalize(
k.xyy * sdfSphere(p + k.xyy * h) + k.yyx * sdfSphere(p + k.yyx * h) +
k.yxy * sdfSphere(p + k.yxy * h) + k.xxx * sdfSphere(p + k.xxx * h));
}
vec3 render(in vec2 uv) {
vec3 color = vec3(0.);
vec3 ro = vec3(0., 0., -2.); // 相机位置
vec3 rd = normalize(vec3(uv, 0.) - ro);
vec3 light = vec3(1., 2., 0.); // 光源
float t = rayMarch(ro, rd);
if (t < TMAX) {
vec3 p = ro + t * rd; // 当前位置
vec3 n = calcNormal(p); // 法向量
float dif = clamp(dot(normalize(light - p), n), 0., 1.);
float amb = .5 + .5 * dot(n, vec3(0., 1., 0.)); // 环境光
color = amb * vec3(.25, .25, .25) + dif * vec3(1.); // 叠加
}
return color;
}
void mainImage(out vec4 fragColor, in vec2 fragCoord) {
vec2 uv = fixUV(fragCoord);
vec3 color = render(uv);
fragColor = vec4(color, 1.); // rgba
}